

































Roboty mobilne to maszyny coraz częściej spotykane w polskim przemyślnie, w magazynach i różnorodnych zastosowaniach intralogistycznych. Są to w istocie wysoce złożone systemy, szczególnie jeżeli chodzi o wykorzystywane układy nawigacji oraz bezpieczeństwa. Kluczowymi elementami zapewniającymi bezpieczeństwo AGV i AMR są skanery laserowe bezpieczeństwa. W dwuczęściowym artykule omawiamy zagadnienia z tym związane, przy czym stawiamy na praktykę dotyczącą doboru, konfiguracji i eksploatacji laserowych komponentów bezpieczeństwa.
Część 1 – Skanery laserowe i systemy bezpieczeństwa
Ilustracja tytułowa: grafika przedstawiająca działanie czujników wizyjnych Visionary-T firmy SICK; bieżący artykuł nie dotyczy takich rozwiązań, ale można o nich przeczytać na stronie producenta
Jednym z głównych wymogów stawianych robotom mobilnym (AGV, AMR i innym) jest zapewnianie bezpieczeństwa dla otoczenia – dla osób i przedmiotów znajdujących się wokół nich. Dostawcy tego typu maszyn twierdza, że są one bezpieczniejsze niż konwencjonalne wózki widłowe i podobne pojazdy. Aby tak jednak było, roboty wyposażane są w dosyć złożone systemy obejmujące czujniki i sterowniki zapewniające bezpieczeństwo AGV. Ich działanie przez lata określała norma PN-EN 1525 „Wózki jezdniowe – Bezpieczeństwo – Wózki bez operatora i ich układy”, gdzie opisano szczegóły bezpiecznych, autonomicznych systemów transportowych. W 2020 roku została ona zastąpiona nowym dokumentem, którym jest norma PN-EN ISO 3691-4:2020.
Bezpieczeństwo AGV: elementy i systemy
Aby zapewnić bezpieczeństwo ruchu i poprawność pracy robotów, AGV wyposażane są w systemy bezpieczeństwa, przy czym wyróżnić tu można dwie kategorie. Pierwszą stanowią elementy aktywne, a więc m.in. laserowe skanery bezpieczeństwa, czujniki, zderzaki, PLC bezpieczeństwa i przyciski zatrzymania awaryjnego. W ich przypadku ma miejsce interakcja z otoczeniem. Z kolei najważniejsze bierne elementy bezpieczeństwa to: światła ostrzegawcze, dźwiękowe sygnały ostrzegawcze i alarmowe oraz oznakowanie robota mobilnego. Jeżeli jako podstawowe urządzenie wykrywające systemu bezpieczeństwa wykorzystywane będą elementy takie jak czujniki bezkontaktowe, to powinny one pracować w układzie fail-safe. Jednocześnie w przypadku wykrycia osoby lub obiektów na drodze pojazdu w odległości nie mniej niż przednia krawędź pola wykrywania w głównym kierunku jazdy , powinno nastąpić zatrzymanie bezpieczeństwa pojazdu przed jego kontaktem z przeszkodą.

Laserowe skanery bezpieczeństwa
Najpopularniejszymi elementami systemów wpływających na bezpieczeństwo AGV są obecnie skanery laserowe bezpieczeństwa. Są to urządzenia bezpieczeństwa typu 3. opisane w normie zharmonizowanej PN-EN IEC 61496-1:2021 „Bezpieczeństwo maszyn – Elektroczułe wyposażenie ochronne – Część 1: Wymagania ogólne i badania”. Gdy funkcja bezpieczeństwa obejmuje laserowe skanery bezpieczeństwa, maksymalny poziom zapewniania bezpieczeństwa (PL – zgodnie z normą ISO 13849) lub poziom nienaruszalności bezpieczeństwa (SIL – zgodnie z normą IEC 62061), który można osiągnąć, to PLd oraz SIL2. Istnieje również specyfikacja techniczna dla laserowych skanerów bezpieczeństwa, IEC 61496-3, która obejmuje szczególne wymagania dla aktywnych optyczno-elektrycznych urządzeń ochronnych reagujących na odbicie rozproszone (AOPDDR).
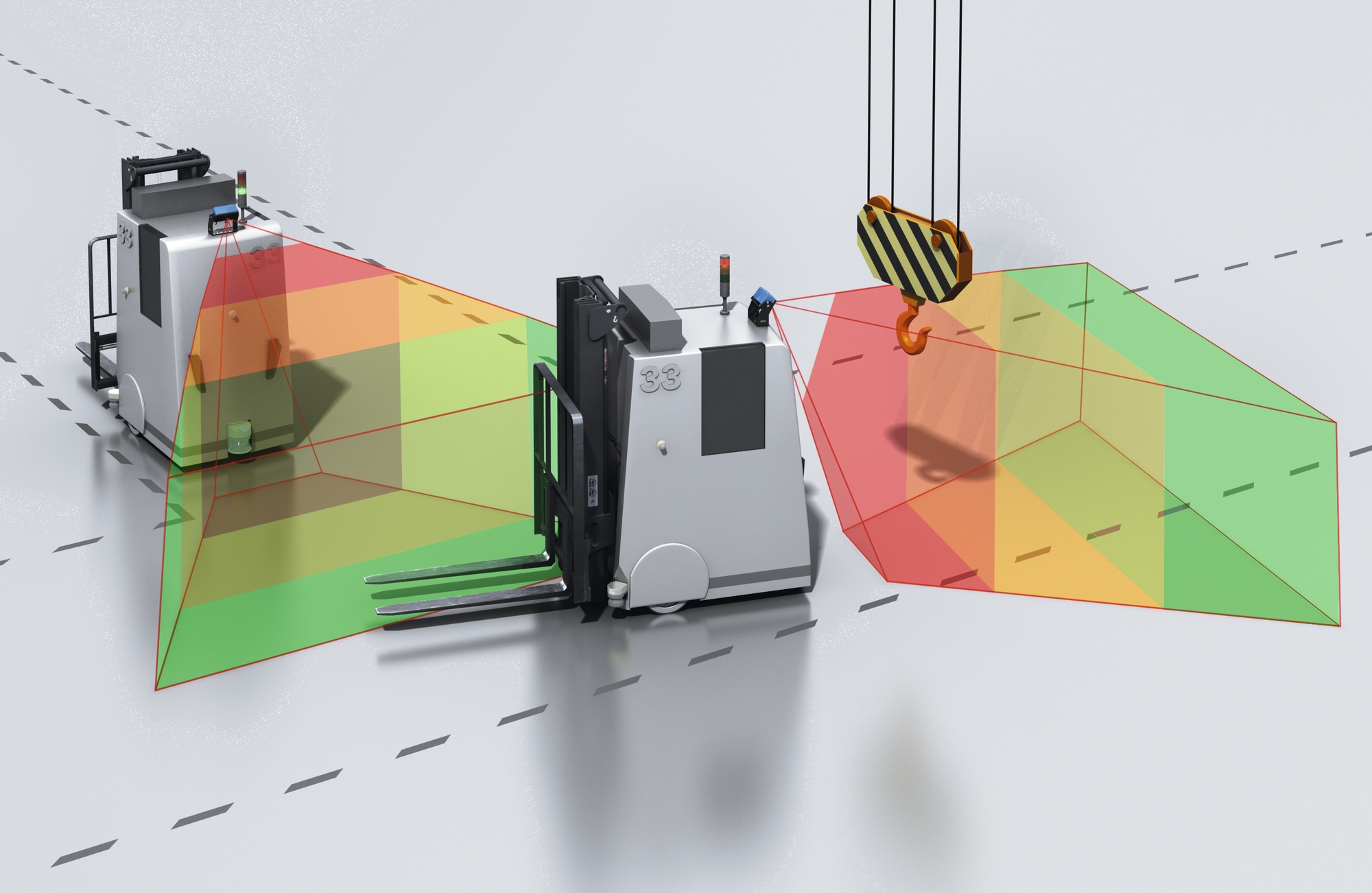
Skanery laserowe bezpieczeństwa umożliwiły pojazdom AGV poruszanie się z większą prędkością, zapewniając bezpieczne bezdotykowe, wykrywanie personelu i przeszkód daleko przed ich ścieżką, a także pozwalając na osiąganie znacznie większych średnich prędkości. Skanery mają typowo 2-3 pola, przy czym kluczowe są te związane z bezpieczeństwem – ostrzegawcze i ochronne. W przypadku „pola ostrzegawczego”, wykrycie przez skaner przeszkody, pozwala na zwolnienie ruchu AGV. Drugim i ważniejszym jest „pole bezpieczeństwa” lub „pole ochronne”. W przypadku znalezienia się w owym polu przeszkody, AGV zatrzymuje się. To jedyne pole, które wiąże się z certyfikacją bezpieczeństwa robota.

Zarówno pole ostrzegawcze, jak i bezpieczeństwa określają strefę bezpieczeństwa. Należy ją zaprojektować biorąc pod uwagę wiele czynników, takich jak: otoczenie, prędkość pojazdu, ładowność czy warunki podłoża. Czasy (i odległości) potrzebne do zatrzymania AGV jadącego z prędkością 2 m/s z ładunkiem 1000 kg są zupełnie inne niż czas potrzebny do zatrzymania AGV jadącego z prędkością 1 m/s z ładunkiem 200 kg. W obu przypadkach bezwładność jest inna, do tego należy wziąć pod uwagę inne czynniki wpływające na hamowanie – szorstkość podłogi, nachylenie, itd.
Jak działają skanery?
Działanie laserowych skanerów bezpieczeństwa bazuje na wykorzystaniu pomiarów czasu przelotu, gdzie impuls światła jest przesyłany, odbijany, a następnie wykrywany. Odległość (d) od obiektu do skanera jest obliczana na podstawie czasu potrzebnego na powrót wiązki (Δt) i prędkości światła (c = 3×108 m/s).  Wewnątrz skanera znajduje się obrotowe lustro, które „przemiata” wiązką światła obszar wokół urządzenia, zapewniając pomiary wokół promienia w płaszczyźnie. Oznacza to, że skaner może utworzyć profil otaczającego obszaru, a użytkownicy – skonfigurować w skanerze różne pola, których można używać do włączania i wyłączania różnych wyjść w celu użycia ich w funkcjach bezpieczeństwa. Niektóre skanery mogą być również używane w wielu funkcjach bezpieczeństwa ze względu na ich zdolność do jednoczesnej oceny wielu pól jednocześnie. Taka analiza umożliwia tworzenie złożonych aplikacji.
Wewnątrz skanera znajduje się obrotowe lustro, które „przemiata” wiązką światła obszar wokół urządzenia, zapewniając pomiary wokół promienia w płaszczyźnie. Oznacza to, że skaner może utworzyć profil otaczającego obszaru, a użytkownicy – skonfigurować w skanerze różne pola, których można używać do włączania i wyłączania różnych wyjść w celu użycia ich w funkcjach bezpieczeństwa. Niektóre skanery mogą być również używane w wielu funkcjach bezpieczeństwa ze względu na ich zdolność do jednoczesnej oceny wielu pól jednocześnie. Taka analiza umożliwia tworzenie złożonych aplikacji.  Dodatkowo takie połączenia mogą tworzyć „zestawy pól” przełączane zależnie od potrzeb – np. programowo czy też na bazie sygnałów z systemu (np. z enkoderów). Każdy konkretny warunek, który określa, który zestaw pól jest wybrany, nazywa się „przypadkiem monitorowania”. Zawiera on określony zestaw pól, warunki wejściowe i może również zawierać inne zmienne, takie jak wielokrotne próbkowanie. Przełączanie między przypadkami wydłuża czas odpowiedzi systemu, dlatego typowo stosuje się wiele pól ochronnych działających jednocześnie w ramach jednego zestawu.
Dodatkowo takie połączenia mogą tworzyć „zestawy pól” przełączane zależnie od potrzeb – np. programowo czy też na bazie sygnałów z systemu (np. z enkoderów). Każdy konkretny warunek, który określa, który zestaw pól jest wybrany, nazywa się „przypadkiem monitorowania”. Zawiera on określony zestaw pól, warunki wejściowe i może również zawierać inne zmienne, takie jak wielokrotne próbkowanie. Przełączanie między przypadkami wydłuża czas odpowiedzi systemu, dlatego typowo stosuje się wiele pól ochronnych działających jednocześnie w ramach jednego zestawu.
Wielokrotne próbkowanie
Domyślnie laserowy skaner bezpieczeństwa musi „zobaczyć” obiekt dwa razy pod rząd, aby zapewnić jego poprawne, bezpieczne wykrycie. W trudnych warunkach środowiskowych i gdy zastosowano skaner o dużej czułości, powodować to może problemy w przypadku występowania brudu, kurzu, iskier spawalniczych lub na skutek wibracji. Stąd też stosuje się zwielokrotnienie wartości próbkowania, tak aby zwiększyć liczbę przypadków, gdy obiekt musi być „ujrzany”, zanim zostanie podany sygnał o jego wykryciu. Pozwala to na lepsze wykrywania w trudnych warunkach, zmniejszając liczbę fałszywych alarmów. Oczywiście, z drugiej strony, czas reakcji jest wydłużany przy każdym dodatkowym skanowaniu, co może mieć niekorzystny wpływ na aplikacje w AGV.

Pola ostrzegawcze i ochronne a bezpieczeństwo AGV
Po zintegrowaniu w systemie z elementami do pomiarów (typowo enkoderami), możliwe jest mierzenie prędkości AGV w celu zapewniania bezpiecznej kontroli poruszania się robota. Korzysta się tu pól ostrzegawczych, tak aby AGV mógł optymalnie zwalniać i przyspieszać zależnie od obiektów oraz osób pojawiających się na jego trasie. Oczywiście najkorzystniej jest również, gdy wykrywanie w polu ochronnym występuje jak najrzadziej. Aczkolwiek gdy to się dzieje, AGV musi zawsze zatrzymywać się wystarczająco szybko, tak aby osoba nie doznała obrażeń lub nie uszkodzono elementów otoczenia oraz samego robota. W praktyce oznacza, że pole ochronne powinno być wystarczająco duże, aby pojazd zatrzymał się przed dotarciem do osoby lub obiektu, niezależnie od wielkości pól ostrzegawczych.

Co wpływa na drogę zatrzymania się robota?
Podstawową normą, którą wykorzystuje się w zakresie elementów zabezpieczających w odniesieniu do prędkości zbliżania się ludzkiego ciała, jest PN-EN ISO 13855 „Bezpieczeństwo maszyn. Umiejscowienie technicznych środków ochronnych ze względu na prędkość zbliżania części ciała człowieka”. Jest to norma zharmonizowana, która zawiera również szczegółowe informacje (wzory) dotyczące obliczania długości pola ochronnego. Wymagana długość pola związana jest z drogą zatrzymania się pojazdu oraz kilkoma innymi wartościami, które wynikają m.in. z błędów związanych z pomiarami oraz parametrami hamowania. Spośród wszystkich wymienionych powyżej parametrów zwykle największą wartością w tym łańcuchu, a tym, który najbardziej się różni, jest droga zatrzymania się pojazdu. Wpływa na nią zarówno droga hamowania (zależy od układu hamowania) oraz droga przebyta w czasie reakcji laserowego skanera bezpieczeństwa i reakcji systemu bezpieczeństwa. Wpływ na te ostatnie mają zarówno sam skaner, jak też czasy wynikające z ustawień próbkowania, transmisji danych i przełączania.

Systemy hamujące w połączeniu z układem wykrywania obiektów i sterowaniem są tak skonstruowane, aby zapewnić odpowiednie zatrzymanie lub zwolnienie szybkości jazdy zależnie od warunków oraz przenoszonego ładunku. W przypadku AGV poruszających się w pełni autonomicznie, warunki zmieniają się w pełni dynamicznie (przechodzące osoby, poruszające się pojazdy, itd.), co czyni zagadnienie bezpiecznej nawigacji skomplikowanym.
Prawidłowy dobór pola jest kluczowy
 Oczywiście trudno jest podać uniwersalne zalecenia dotyczące doboru pola, bowiem każdy system sterowania AGV, każdy skaner, a także środowisko pracy jest różne. Praktyczną zasadą przy wyborze urządzenia powinien być jego krótki czas reakcji i możliwość pracy z niewielką liczbą wielokrotnych próbkowań. Ważne są też sposoby łączenia z systemem bezpieczeństwa (albo połączenia bezpośrednie, albo wykorzystanie bezpiecznej komunikacji cyfrowej). Pole ochronne musi być odpowiednio dobrane do zastosowania, przy czym w aplikacjach mobilnych korzystne jest, aby było ono jak najmniejsze ze względu na problemy związane z fałszywymi alarmami. Stąd też należy wziąć pod uwagę czas reakcji skanera i całego systemu. Wielokrotne skanowanie może istotnie wydłużyć czas reakcji, stąd też ten aspekt również powinien być wzięty pod uwagę. Należy również zauważyć, że istotniejsze od maksymalnego pola ochronnego skanera może być, szczególnie w przypadku AVG i aplikacji mobilnych, całkowity czas reakcji i odporność na wykrywanie. Celem jest zapewnienie jak najmniejszego „footprintu” AGV (powierzchni robota i pól wykrywania) podczas jazdy. Oczywiście wzrost długości pola ochronnego zwiększa prawdopodobieństwo wyzwolenia systemu i zahamowania pojazdu. Stąd też korzystne jest jej minimalizowanie, co również pozwala na:
Oczywiście trudno jest podać uniwersalne zalecenia dotyczące doboru pola, bowiem każdy system sterowania AGV, każdy skaner, a także środowisko pracy jest różne. Praktyczną zasadą przy wyborze urządzenia powinien być jego krótki czas reakcji i możliwość pracy z niewielką liczbą wielokrotnych próbkowań. Ważne są też sposoby łączenia z systemem bezpieczeństwa (albo połączenia bezpośrednie, albo wykorzystanie bezpiecznej komunikacji cyfrowej). Pole ochronne musi być odpowiednio dobrane do zastosowania, przy czym w aplikacjach mobilnych korzystne jest, aby było ono jak najmniejsze ze względu na problemy związane z fałszywymi alarmami. Stąd też należy wziąć pod uwagę czas reakcji skanera i całego systemu. Wielokrotne skanowanie może istotnie wydłużyć czas reakcji, stąd też ten aspekt również powinien być wzięty pod uwagę. Należy również zauważyć, że istotniejsze od maksymalnego pola ochronnego skanera może być, szczególnie w przypadku AVG i aplikacji mobilnych, całkowity czas reakcji i odporność na wykrywanie. Celem jest zapewnienie jak najmniejszego „footprintu” AGV (powierzchni robota i pól wykrywania) podczas jazdy. Oczywiście wzrost długości pola ochronnego zwiększa prawdopodobieństwo wyzwolenia systemu i zahamowania pojazdu. Stąd też korzystne jest jej minimalizowanie, co również pozwala na:
- pracę wielu AGV bliżej siebie,
- minimalizację wymaganych przestrzeni ruchu,
- rzadsze zatrzymania lub spowolnienia AGV spowodowane przez personel,
- możliwość szybszego poruszania się pojazdów.
W artykule wykorzystano m.in. publikacje firmy SICK dotyczące laserowych skanerów bezpieczeństwa. W drugiej części artykułu bezpieczeństwo AGV (poniżej) omówione są najczęstsze błędy związane z doborem i konfiguracją skanerów w zastosowaniach związanych z AGV. Polecamy również artykuł firmy ELOKON poświęcony omawianej tematyce publikowany w serwisie AutomatykaB2B.pl.
